## Exemplo 1:
set.seed(1)
# Gerando uma amostra Bernoulli
p <- 0.3
x <- rbinom(n = 100, size = 1, prob = p)
# Estimando p
p_hat <- mean(x)
# Visualizando parâmetro estimado
p_hat[1] 0.32Probabilidade para Aprendizagem Estatístico de Máquina
UFPE
representam variáveies aleatórias (v.a.);
representam realizações da variáveis aleatórias;
representam vetores aleatórios;
representam realização de vetores aleatórios;
representam matrizes aleatórios;
representam realização de matrizes aleatória;
dimensão das \(features\), variáveis
tamanho da amostra
\(i\)-ésima observação, instância
\(j\)-ésima \(feature\), variável
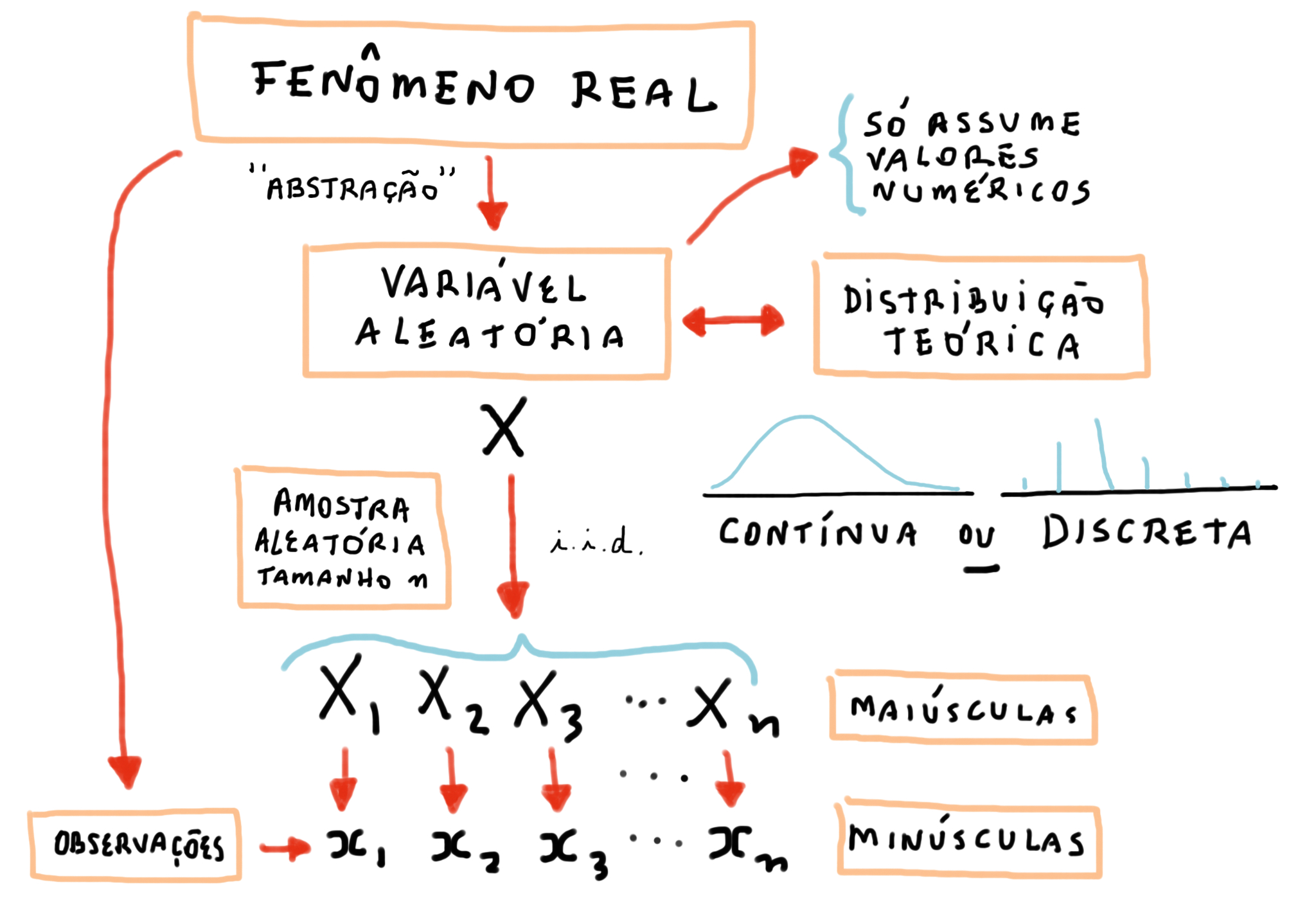
Na realização de um fenômeno aleatório, é comum termos interesse em uma ou mais variáveis quantitativas. Essas quantidades são chamadas de variáveis aleatórias.
O conhecimento de variáveis aleatórias é muito importante, pois permite a modelagem probabilística de fenômenos da vida real.
O espaço amostral, que podemos representar por \(\Omega\), é o conjunto de todos os possíveis resultados de um experimento aleatório.
Lançamento de um dado honesto de seis faces: \(\\\) \(\Omega\) = {1, 2, 3, 4, 5, 6}
Lançamento de uma moeda: \(\\\) \(\Omega\) = {Cara, Coroa}
O espaço amostral deve incluir todos os resultados possíveis e é a base para a definição de eventos e cálculos de probabilidades.
Um ponto amostral é um resultado individual em um espaço amostral de um experimento aleatório, e é denotado genericamente por \(w\). Assim, escrevemos que \(w \in \Omega\) para indicar que o elemento \(w\) está em \(\Omega\).
Cada ponto amostral representa uma das possíveis observações após a realização do experimento.
Um evento é um subconjunto do espaço amostral que descreve um ou mais resultados possíveis de um experimento aleatório.
Espaço Amostral \(\rightarrow\) \(\Omega\) = {1, 2, 3, 4, 5, 6}
Evento A: Obter um número par \(\\\) A = {2, 4, 6}
Os eventos são a base para a análise de probabilidades e são definidos como subconjuntos do espaço amostral.
Seja \(\mathcal{A}\) a classe dos eventos aleatórios (conjunto de eventos aleatórios), temos as seguintes propriedades para \(\mathcal{A}\):
Uma classe \(\mathcal{A}\) de subconjuntos de um conjunto não-vazio \(\Omega\) satisfazendo A1, A2 e A3’ é chamada de \(\sigma\)-álgbera de subconjuntos de \(\Omega\).
Assim, temos que uma \(\sigma\)-álgebra é fechada para um número enumerável de aplicações das operações \(\cup\), \(\cap\) e \(^c\). E seja \(\mathcal{A}\) uma \(\sigma\)-álgebra, então:
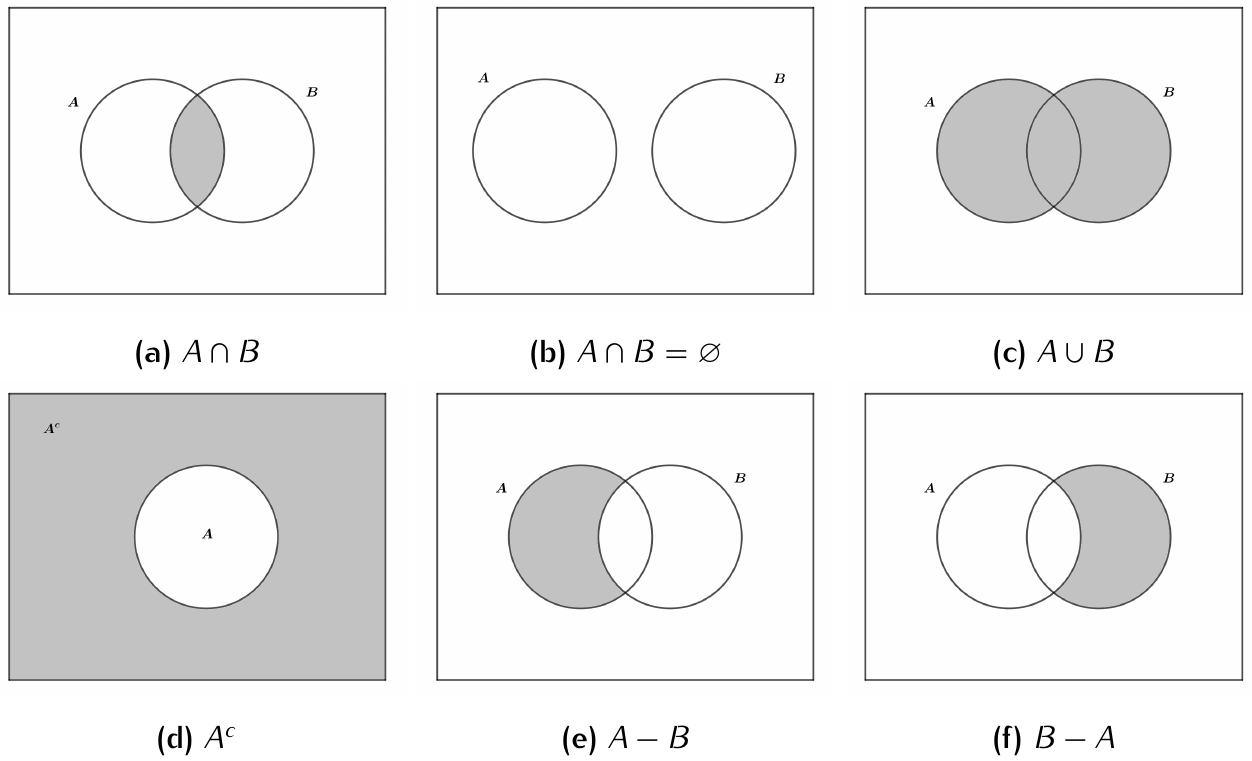
P1. Se \(A, B \in \mathcal{A}\), temos que \(A-B = A \cap B^c \in \mathcal{A}\);
P2. Se \(A, B \in \mathcal{A}\), temos que \(A \Delta B = (A \cap B^c)\cup (B \cap A^c) \in \mathcal{A}\)
P3. Seja \(\{A_n\}_{n \geq 1}\), uma sequência de elementos em \(\mathcal{A}\), temos que \(\cup_{n=1}^{\infty}A_n \in \mathcal{A}\) e \(\cap_{n=1}^{\infty}A_n \in \mathcal{A}\);
Seja \(\Omega\) um conjunto não-vazio e \(\mathcal{A}\) uma \(\sigma\)-álgebra de subconjuntos de \(\Omega\). A função \(P: \mathcal{A} \rightarrow \mathbb{R}\) é dita probabilidade se satisfaz os seguintes axiomas:
Ax1) \(P(A)\geq 0\);
Ax2) \(P(\Omega) = 1\);
Ax3) ( \(\sigma\) -aditividade) Seja \(\{A_n\}_{n \geq 1}\), uma sequência de elementos em \(\mathcal{A}\), tal que \(A_i \cap A_j = \emptyset, \forall i \neq j\), isto é, disjuntos 2 a 2, então \(P(\cup_{n=1}^\infty A_n) = \sum_{n=1}^\infty A_n\).
Um espaço de probabilidade é uma estrutura \((\Omega,\mathcal{A}, P)\) em que \(\Omega \neq \emptyset\), \(\mathcal{A}\) é uma \(\sigma\)-álgebra de subconjuntos de \(\Omega\) e \(P:\mathcal{A} \rightarrow \mathbb{R}\) é uma probabilidade em \(\mathcal{A}\).
Dado os axiomas de Kolmogorov, é possível definir as seguintes propriedades:
P1) \(P(A) \geq 1 - P(A^c)\);
P2) \(0 \leq P(A) \leq 1\);
P3) Se \(A \subset B\), então \(P(A) \leq P(B)\);
P4) \(P(\cup_{i=1}^{n}A_i) \leq \sum_{i=1}^{n}P(A_i)\) (subaditividade finita);
P5) \(P(\cup_{n=1}^{\infty}A_n) \leq \sum_{n=1}^{\infty}P(A_n)\) ( \(\sigma\) -subaditividade);
P6) (continuidade de probabilidade) Se \(A_n \uparrow A\), então \(P(A_n) \uparrow P(A)\). Se \(A_n \downarrow A\), então \(P(A_n) \downarrow P(A)\).
Exemplo:
Se \(P(A) = 1/3\) e \(P(B^c) = 1/4\), \(A\) e \(B\) podem ser mutuamente exclusivos, ou seja, eventos disjuntos?
Exemplo:
Se \(P(A) = 1/3\) e \(P(B^c) = 1/4\), \(A\) e \(B\) podem ser mutuamente exclusivos, ou seja, eventos disjuntos?
Solução:
\(P(B) = 1- P(B^c) = \dfrac{3}{4}\\\)
Considerando que \(A\) e \(B\) são mutuamente exclusivos, temos
\(P(A \cup B) = P(A) + P(B) = \dfrac{1}{3} + \dfrac{3}{4} = \dfrac{13}{12} > 1.\\\)
Logo, \(A\) e \(B\) não são mutuamente exclusivos, ou seja, existe interseção entre eles, \(A \cap B \neq \emptyset\).
Exemplo:
Sejam \(A\) e \(B\) eventos mutuamente exclusivos tais que \(P(A) = 0,5\) e \(P(B) = 0,4\).
a) Calcule \(P(A \cup B)\).
b) Calcule \(P(B \cap A^c)\).
Exemplo:
Sejam \(A\) e \(B\) eventos mutuamente exclusivos tais que \(P(A) = 0,5\) e \(P(B) = 0,4\).
a) Calcule \(P(A \cup B)\).
b) Calcule \(P(B \cap A^c)\).
Solução:
Do enunciado, concluímos que \(A \cap B = \emptyset\). Logo,
\(P(A \cup B) = P(A) + P(B) = 0,5 + 0,4 = 0,9\)
\(P(B \cap A^c) = P(B) - P(A \cap B) = 0,4 - 0 = 0,4\)
Seja \((\Omega, \mathcal{A},P)\) espaço de probabilidade e seja \(A \in \mathcal{A}\), tal que, \(P(A) > 0\). Seja \(B \in \mathcal{A}\), definimos a probabilidade condicional de \(B\) dado \(A\) como
\[\begin{align} P(B|A) = \dfrac{P(A \cap B)}{P(A)}. \end{align}\]
Da equação acima, temos que
\[\begin{align} P(A \cap B) = P(A)P(B|A). \end{align}\]
Generalizando, temos que
\[\begin{align} P \left(\bigcap_{j=1}^{n}A_j \right) = \prod_{j=1}^{n}P \left( A_j | \bigcap_{i=1}^{n-1}A_i\right). \end{align}\]
Seja \(\{A_n\}_{n \geq 1}\) sequência de eventos em \(\mathcal{A}\) que formam partição em \(\Omega\), ou seja, são eventos disjuntos 2 a 2, então
\[\begin{align} P(B) = \sum_{n} P(A_n) P(B | A_n), \forall B \in \mathcal{A}. \end{align}\]
Demonstração:
Temos que \(\Omega = \cup_n A_n\), união disjunta. Logo,
\[\begin{align} P(B) & = P(\Omega \cap B) = P (\cup_n A_n \cap B) = \nonumber \\ & = P(\cup_n (A_n \cap B)) = \sum_n P(A_n \cap B) = \sum_n P(B | A_n) P(A_n) \end{align}\]
Do Teorema anterior, é possível calcular a probabilidade de \(A_n\) dado a ocorrência de B:
\[\begin{align} P(A_n | B) = \dfrac{P(A_n \cap B)}{P(B)} = \dfrac{P(A_n)P(B|A_n)}{\sum_n P(B|A_n)P(A_n)} \end{align}\]
Esta é a Probabilidade de Bayes, a qual é útil quando conhecemos as probabilidades dos \(A_n\)’s e as probabilidades condicionais de \(B\) dado \(A_n\), mas não conhecemos diretamente a probabilidade de \(B\).
Para \(A \in \mathcal{A}\), com \(P(A) > 0\), a função \(P_A:\mathcal{A} \rightarrow [0,1]\) definida por \(P_A(B) = P(B | A)\) é uma probabilidade.
Segue a análise dos axiomas:
Ax1) \(P_A(\Omega) = P(\Omega|A) = \dfrac{P(A \cap \Omega)}{P(A)} = 1\);
Ax2) \(P_A \geq 0\), é válido porque \(P \geq 0\);
Ax3) Seja \(\{B_n\}_{n \geq 1}\) sequência de elementos disjuntos em \(\mathcal{A}\). Então, \(P_A(\cup_{n=1}^{\infty}B_n) = P(\cup_{n=1}^{\infty}B_n | A) = \dfrac{P(A \cap \cup_{n=1}^{\infty} B_n)}{P(A)} =\)
\(\sum_{n=1}^{\infty} P(B_n | A) = \sum_{n=1}^{\infty} P_A(B_n)\);
Dado um fenômeno aleatório qualquer, com um certo espaço de probabilidade, desejamos estudar a estrutura probabilística de quantidades associadas a esse fenômeno.
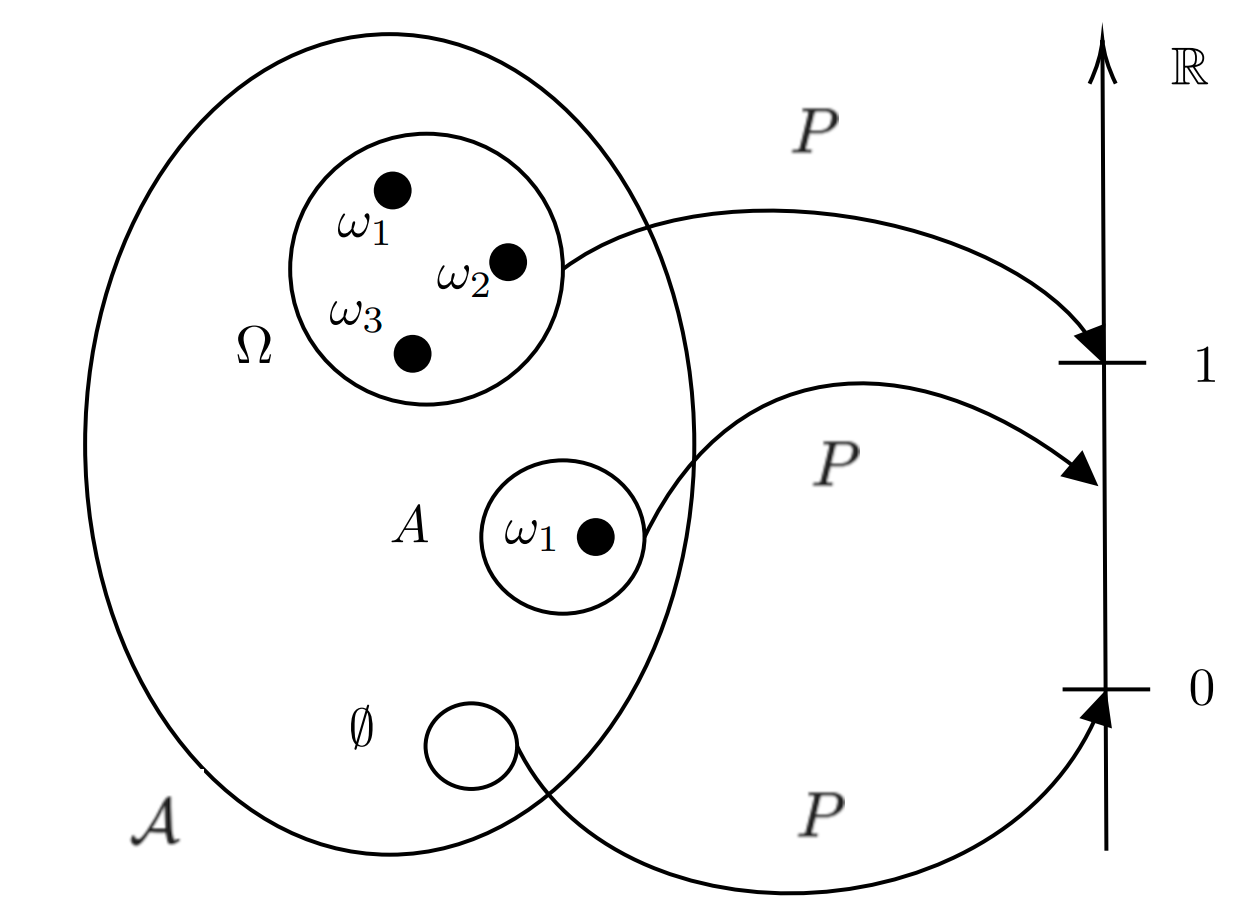
Seja \((\Omega,\mathcal{A}, P)\) um espaço de probabilidade. Denominamos de variável aleatória, qualquer função \(X:\Omega \rightarrow \mathbb{R}\) tal que
\[\begin{align} X^{-1} (I) = \{ \omega \in \Omega : X(\omega) \in I\} \in \mathcal{A}, \end{align}\]
para todo intervalo \(I \subset \mathbb{R}\). Em outras palavras, \(X\) é variável aleatória se sua imagem inversa para intervalos \(I \subset \mathbb{R}\) pertencem a \(\sigma\)-álgebra \(\mathcal{A}\).
Seja \(X\) uma variável aleatória em \((\Omega,\mathcal{A}, P)\), sua função de distribuição é definida por
\[\begin{align} F_X(x) = P(X \in (\infty,x]) = P(X \leq x), \end{align}\]
com \(x\) percorrendo todos os reais.
Propriedades da Função de Distribuição:
F1) \(\lim\limits_{x \to -\infty} F_X(x) = 0\) e \(\lim\limits_{x \to +\infty} F_X(x) = 1\);
F2) \(F_X\) é contínua a direita;
F3) \(F_X\) é não decrescente, isto é, \(F_X(x) \leq F_X(y)\) sempre que \(x \leq y\), \(\forall x,y \in \mathbb{R}\).
Uma variável aleatória é definida como discreta, se assume somente uma quantidade enumerável de valores. Sendo \(X\) uma variável aleatória com valores \(x_1, x_2, \ldots\), temos para \(i = 1,2,\ldots\),
\[\begin{align} p(x_i) = P( X = x_i) = P({\omega \in \Omega : X(\omega) = x_i}). \end{align}\]
Propriedades da Função de Probabilidade:
fp1) \(0 \leq p(x_i) \leq 1, \forall i = 1,2,\ldots\);
fp2) \(\sum\limits_i p(x_i) = 1\);
com a soma percorrendo todos os possíveis valores.
Uma variável aleatória \(X\) em \((\Omega, \mathcal{A}, P)\), com função de distribuição \(F_X\) é classificada como contínua, se existir uma função não negativa \(\mathcal{f}\) tal que:
\[\begin{align} F_X(x) = \int_{-\infty}^{x} \mathcal{f}(\omega)d\omega, \text{ para todo } x \in \mathbb{R}. \end{align}\]
A função \(\mathcal{f}\) é denominada função densidade.
Propriedades da Função Densidade:
fd1) \(\mathcal{f}(x) \geq 0, \forall x \in \mathbb{R}\);
fd2) \(\int_{-\infty}^{\infty} \mathcal{f}(x)dx = 1\).
Seja \((\Omega,\mathcal{A}, P)\) um espaço de probabilidade, então, uma função \(\mathbf{x} = (X_1, \ldots, X_p): \Omega \rightarrow \mathbb R^p\) que é \(\mathcal A\)-mensurável, é dito ser vetor aleatório. Temos que \(\mathbf{x}\) é vetor aleatório, se
\[\begin{align} \mathbf{x}^{-1} (\boldsymbol H) \in \mathcal{A}, \forall \boldsymbol H \in \mathbb R^p \end{align}\]
Em outras palavras, \(\mathbf{x}\) é vetor aleatório se para cada \(i = 1,\ldots,p\) e \(H_i \subset \mathbb R\), tivermos
\[\begin{align} X_i^{-1} (H_i) \in \mathcal{A}, \end{align}\]
ou seja, cada \(X_i\) é variável aleatória.
Seja \(F_{\mathbf{x}}: \mathbb R^p \rightarrow \mathbb [0,1]\) uma função definida como \(F_{\mathbf{x}}(\dot{\mathbf{x}}) = \mu_{\mathbf{x}}(S_{\mathbf{x}})\), em que \(S_{\mathbf{x}} = (-\infty,x_1]\times\cdots\times(\infty,x_p]\) o conjunto obtido a partir de \({\mathbf{x}} = (X_1, \ldots, X_p)\). Então, \(F_{\mathbf{x}}\) é a função de distribuição conjunta de \(X_1, \ldots, X_p\) ou simplesmente função de distribuição de \(\mathbf{x}\).
Seja \({\mathbf{x}}\) um vetor aleatório em \((\Omega, \mathcal A, P)\) então, para qualquer \(\dot{\mathbf{x}} \in \mathbb R^p\), \(F_{\mathbf{x}}(\dot{\mathbf{x}})\) satisfaz as seguintes propriedades:
FC1) \(F_{\mathbf{x}}(\dot{\mathbf{x}})\) é não decrescente em cada uma das suas coordenadas.
FC2) \(F_{\mathbf{x}}(\dot{\mathbf{x}})\) é contínua a direita em cada uma das suas coordenadas;
FC3) Se para algum \(j\), \(x_j \rightarrow -\infty\), então \(F_{\mathbf{x}}(\dot{\mathbf{x}}) \rightarrow 0\) e \(\\\) \(\hspace{1.5cm}\) Se para todo \(j\), \(x_j \rightarrow +\infty\), então \(F_{\mathbf{x}}(\dot{\mathbf{x}}) \rightarrow 1\)
FC4) \(F_{\mathbf{x}}(\dot{\mathbf{x}})\) é tal que, \(\forall a_i, b_i \in \mathbb R\), \(a_i < b_i\), \(1 \leq i \leq p\), temos \(\\\) \[P(a_1 < X_1 \leq b_1, \ldots, a_p < X_p \leq b_p) \geq 0. \]
Dizemos que \(\mathbf{x}\) é um vetor aleatório discreto, quando existir \(S \subset \mathbb R^p\) contável (finito ou enumerável) tal que \(\mu_{\mathbf{x}}(S) = 1\). Neste caso, a função
\[\begin{align} P_{\mathbf{x}}({\dot{\mathbf{x}}}) = \mu_{\mathbf{x}}(\left\lbrace \dot{\mathbf{x}} \right\rbrace) = P( \mathbf{x} = \dot{\mathbf{x}}), \forall{\dot{\mathbf{x}}} \in \mathbb R^p \end{align}\]
é chamada função de probabilidade de \(\mathbf{x}\).
Temos que \(\mathbf{x} = (X_1, \ldots, X_p)\) é vetor aleatório discreto, se e somente se, cada variável \(X_i\), \(i = 1,\ldots,p\) é discreto.
Dado \(\mathbf{x} = (X_1, \ldots, X_p)\) vetor aleatório, temos que
\[[X_1 \leq x_1, \ldots,X_i \leq x_i, \ldots, X_p \leq x_p] \uparrow [X_i \leq x_i], \, x_j \uparrow +\infty, \, \forall j \neq i\]
Logo,
\[P(X_1 \leq x_1, \ldots,X_i \leq x_i, \ldots, X_p \leq x_p) \uparrow P(X_i \leq x_i), \, x_j \uparrow +\infty, \, \forall j \neq i\]
ou seja,
\[\lim\limits_{x_j \to +\infty \\ \forall j \neq i} F_{\mathbf{x}}({\dot{\mathbf{x}}}) = P (X_i \leq x_i) = F_{X_i}(x_i)\]
\(F_{X_i}(x_i)\) é chamada funçao de distribuição marginal de \(X_i\), \(i = 1, \ldots, p\).
Neste caso temos
Seja \(X_i\) com \(i = 1, \ldots, p\) a função de distribuição marginal é dada por
\[\begin{align} F_{X_i}(x_i) = P (X_i \leq x_i) \end{align}\]
Seja \(X_i\) com \(i = 1, \ldots, p\) a função de probabilidade marginal é dado por
\[\begin{align} P_{X_i}(x_i) = P (X_i = x_i) \end{align}\]
A função de probabilidade conjunta é dada por: \[\begin{align} P(\mathbf{x}) = & P(X_1 = x_1, X_2 = x_2, \ldots, X_p = x_p) \\ = & \exp \left( -\sum_{i=1}^p \theta_i \right) \prod_{i=1}^p \frac{\theta_i^{x_i}}{x_i!} \sum_{i=0}^s \prod_{j=1}^p \binom{x_j}{i} i! \left( \frac{\theta_0}{\prod_{i=1}^p \theta_i} \right)^i \end{align}\] onde \(s = \min(x_1, x_2, \ldots, x_p)\).
Marginalmente, cada \(X_i\) segue uma distribuição de Poisson com parâmetro \(\theta_0 + \theta_i\).
O parâmetro \(\theta_0\) é a covariância entre todos os pares de variáveis aleatórias.
Se \(\theta_0 = 0\), então as variáveis são independentes.
Dizemos que \(\mathbf{x}\) é um vetor aleatório que possui distribuições absolutamentes contínuas se existir \(f_{\mathbf{x}} \geq 0\) tal que, \(\forall H \in \mathbb R^p\), temos
\[\begin{align} F_{\mathbf{x}}(H) = \idotsint\limits_H f_{\mathbf{x}}(x_1, \ldots, x_p)dx_1\ldots dx_p \end{align}\]
em que, \(f_{\mathbf{x}}\) é chamada função densidade de \(\mathbf{x}\).
Neste caso temos
Seja \(X_i\) com \(i = 1, \ldots, p\) a função de distribuição marginal é dada por
\[\begin{align} F_{X_i}(x_i) = P (X_i \leq x_i) \end{align}\]
Seja \(X_i\) com \(i = 1, \ldots, p\) a função densidade marginal é dado por
\[\begin{align} P_{X_i}(x_i) = f_{X_i}(x_i) \end{align}\]
A distribuição normal multivariada para um vetor aleatório \(\mathbf{x} \in \mathbb{R}^p\) com média \(\boldsymbol{\mu}\) e matriz de covariância \(\boldsymbol{\Sigma}\) é dada por:
\[ f\mathbf{x}(\dot{\mathbf{x}}) = \frac{1}{(2\pi)^{p/2} |\boldsymbol{\Sigma}|^{1/2}} \exp \left( -\frac{1}{2} (\dot{\mathbf{x}} - \boldsymbol{\mu})^\top \boldsymbol{\Sigma}^{-1} (\dot{\mathbf{x}} - \boldsymbol{\mu}) \right) \]
Onde:
Por Magalhães, em seu livro “Probabilidade e Variáveis Aleatórias”, a propriedade denominada independência de eventos é uma propriedade particular de grande importância. Ela permite, muitas vezes, separar o experimento em partes mais simples de serem estudadas e, assim, possibilitar uma enorme simplificação nos cálculos probabilísticos de interesse.
Seja \((\Omega, \mathcal{A}, P)\) espaço de probabilidade. Dizemos que os eventos \(A,B \in \mathcal{A}\) são independentes, se
\[\begin{align} P(A \cap B) = P(A)P(B) \end{align}\]
Se \(P(A) > 0\), então temos que \(P(B|A) = P(B)\)
Pela probabilidade condicional temos que
\[\begin{align} P(B|A) = \dfrac{P(A \cap B)}{P(A)} = \dfrac{P(A)P(B)}{P(A)} \end{align}\]
assim,
\[\begin{align} P(B|A) = P(B) \end{align}\]
Seja \(\mathcal{I} \neq \emptyset\) um conjunto arbitrário de índices e seja a classe \(\zeta = \{A_s:s \in \zeta \} \in \mathcal{A}\). Dizemos que \(\zeta\) é uma classe de eventos independentes quando para todo conjunto de índices \(s_1, s_2, \ldots \in \mathcal{I}\) tivermos
\[\begin{align} P( \cap_{i=1}^{p} A_{s_i}) = \prod_{i=1}^{p} P (A_{s_i}) \end{align}\]
Por exemplo, \(A,B,C \in \mathcal{A}\) são independentes quando satifaz:
Sendo assim, para Funções de distribuição com vetores aleatórios temos os seguintes critérios de independência:
c1) Se \(X_1, \ldots, X_p\) são independentes, então
\[\begin{align} F_{X_1, \ldots, X_p}(x_1, \ldots, x_p) = \prod\limits_{i=1}^p F_{X_i}(x_i), \forall (x_1, \ldots, x_p) \in \mathbb R^p \end{align}\]
c2) Reciprocamente, se existem funções \(F_1, \ldots, F_p\) tais que
\[\begin{align} \lim\limits_{x \rightarrow + \infty} F_i(x) = 1, \forall i \text{ e } \end{align}\]
\(F_{X_1,\ldots,X_p}(x_1,\ldots,x_p) = \prod\limits_{i=1}^pF_i(x_i), \forall (x_1,\ldots,x_p) \in \mathbb R^p,\) então \(X_1, \ldots, X_p\) são independentes e \(F_i = F_{X_i}, \forall i = 1,\ldots,p\).
e para as funções de probabilidade e funções densidades temos:
Assim temos que para o Caso Discreto, se \(X_1, \ldots, X_p\) são independentes, então
\[\begin{align} P(X_1 = x_1, \ldots, X_p = x_p) = \prod\limits_{i=1}^pP(X_i = x_i) \end{align}\]
E no caso absolutamente contínuo, se \(X_1, \ldots, X_p\) são independentes, então
\[\begin{align} f_{\mathbf{x}}(x_1, \ldots, x_p) = \prod\limits_{i=1}^p f(X_i = x_i) \end{align}\]
a função densidade conjunta fatora nas densidades marginais.
Seja \(\Omega = \{1,2,3,4,5,6\}\) com \(P(\{i\}) = 1/6\), para \(i=1,2,3,4,5,6\). Sejam \(A = \{1,2,3,4\}\), \(B = \{4,5,6\}\) e \(C = \{2,3,4\}\).
Mostre que \(A,B\) e \(C\) não são independentes.
Seja \(\Omega = \{1,2,3,4,5,6\}\) com \(P(\{i\}) = 1/6\), para \(i=1,2,3,4,5,6\). Sejam \(A = \{1,2,3,4\}\), \(B = \{4,5,6\}\) e \(C = \{2,3,4\}\).
Mostre que \(A,B\) e \(C\) não são independentes.
Solução:
Temos que \(P(A) = \dfrac{4}{6}\), \(P(B) = \dfrac{3}{6}\) e \(P(C) = \dfrac{3}{6}\). Assim, temos que \[P(A \cap B \cap C) = P(\{4\}) = \dfrac{1}{6}\]
\[\text{e } P(A)P(B)P(C) = \dfrac{4}{6}\dfrac{3}{6}\dfrac{3}{6}= \dfrac{1}{6}\]
Seja \(\Omega = \{1,2,3,4,5,6\}\) com \(P(\{i\}) = 1/6\), para \(i=1,2,3,4,5,6\). Sejam \(A = \{1,2,3,4\}\), \(B = \{4,5,6\}\) e \(C = \{2,3,4\}\).
Mostre que \(A,B\) e \(C\) não são independentes.
Solução:
Além disso, temos que \[P(A \cap B) = \dfrac{1}{6},\, P(A \cap C) = \dfrac{2}{6} \text{ e } P(B \cap C) = \dfrac{1}{6},\] entretanto,
\[P(A)P(B) = \dfrac{4}{6}\dfrac{3}{6} = \dfrac{1}{3} \neq \dfrac{1}{6} = P(A \cap B)\]
Seja \(X\) uma variável aleatória (v.a.) com função densidade (caso contínuo) ou função de probabilidade (caso discreto) denotado por \(f(x;\theta) = f_{\theta}(x)\), em que \(\theta\) é o parâmetro desconhecido. Assumiremos que a distribuição de \(X\) pertence a uma certa família \(\mathcal{F} = \{F_{\theta}: \theta \in \Theta \}\) de distribuições indexadas por \(\theta\) e temos que \(\Theta\) é conhecido como espaço paramétrico.
Uma sequência \(X_1, \ldots, X_n\) de \(n\) v.a. independentes e identicamente distribuídas (i.i.d) com função densidade ou função de probabilidade \(f(x;\theta)\), é dito ser amostra aleatória de tamanho \(n\) da distribuição de \(X\).
Como consequência, temos que a densidade conjunta de \(X_1, \ldots, X_n\) é dado por \[\begin{align} f(x_1, \ldots, x_n; \theta) = \prod\limits_{i=1}^{n} f(x_i; \theta) \end{align}\]
Qualquer função da amostra \(T = T(X_1, \ldots, X_n)\) que não dependa de parâmetros desconhecidos é chamada de Estatística.
Uma estatística pode ser vista como um método de redução de dados \(X_1, \ldots, X_n\). O objetivo é obter algum resultado que seja resumo dos dados para melhor entendê-los
\(\overline{X} = \sum\limits_{i=1}^{n}\dfrac{X_i}{n}\)
\(S^2 = \sum\limits_{i=1}^{n}\dfrac{(X_i - \overline{X})^2}{n - 1}\)
\(X_{(1)} = \underset{i=1, \ldots, n}{\text{min}}(X_i)\)
\(X_{(n)} = \underset{i=1, \ldots, n}{\text{max}}(X_i)\)
Uma estrutura \((\mathcal{X}, \mathcal{A}, \mathcal{F})\) é chamada de modelo estatístico, em que \(\mathcal{X}\) é o conjunto dos possíveis valores de \(X\), \(\mathcal{A}\) é uma \(\sigma\)-álgebra dos subconjuntos de \(X\) e \(\mathcal{F} = \{F_{\theta}:\theta \in \Theta \subset \mathbb{R}^p\}, p = 1,\ldots\) é uma família de distribuições a qual a distribuição de \(X\) pertence.
Seja \((\mathcal{X}, \mathcal{A}, \mathcal{F})\) um modelo estatístico associado a uma variável \(X\), em que a família de distribuições \(\mathcal{F} = \{F_{\theta}:\theta \in \Theta \subset \mathbb{R}^p\}\) depende de um vetor de parâmetros desconhecidos \(\theta\).
Um estimador pontual para \(\theta\) é uma função \(\delta(X): \mathcal{X} \rightarrow \mathbb{R}\) que assume valores em \(\Theta\).
Um estimador pontual como função apenas da amostra é uma estatística.
Uma vez observado \(X=x\), temos que \(\delta(x)\) é chamado de estimativa de \(\theta\).
Vamos introduzir o conceito de Máxima Verossimilhança para os casos discretos e contínuos.
Suponha que \(X_1, \ldots, X_n\) são variáveis aleatórias (v.a.) discretas com distribuição conjunta discreta e que observamos \(X_1 = x_1, \ldots, X_n = x_n\). Seja,
\[\begin{align} p_{\theta}(x_1,\ldots, x_n) = P(X_1 = x_1, \ldots, X_n = x_n), \end{align}\]
considerando o parâmetro \(\theta\) desconhecido.
Seja as observações independentes e \(p_{\theta}(x_i)\) função de probabilidade marginal de \(X_i\), então temos que
\[\begin{align} p_{\theta}(x_1,\ldots, x_n) = \prod\limits_{i=1}^{n} p_{\theta}(x_i). \end{align}\]
Suponha que \(X_1, \ldots, X_n\) são v.a. contínuas com distribuição conjunta adotando a densidade conjunta para \(X_1 = x_1, \ldots, X_n = x_n\) dada por,
\[\begin{align} f_{\theta}(x_1,\ldots, x_n), \end{align}\]
considerando o parâmetro \(\theta\) desconhecido.
Seja as observações independentes e \(f_{\theta}(x_i)\) função densidade marginal de \(X_i\), então temos que
\[\begin{align} f_{\theta}(x_1,\ldots, x_n) = \prod\limits_{i=1}^{n} f_{\theta}(x_i). \end{align}\]
Dado \({\dot{\mathbf{x}}} = (x_1, \ldots, x_n)^\top\), a função
\[\begin{align} L(\theta) = L(\theta; {\dot{\mathbf{x}}} ) = f_{\theta}(x_1, \ldots, x_n) \end{align}\]
observada como função do parâmetro \(\theta\) a ser maximizada é chamada função de máxima verossimilhança.
Na maioria das vezes é conveniente trabalhar com o logaritmo da função de verossimilhança
\[\begin{align} \ell (\theta) = \log \{ L(\theta) \}, \end{align}\]
que é chamada função de log-verossimilhança.
Observação: Se as observações são independentes, então
\[\begin{align} \ell (\theta) = \log \left\lbrace \prod\limits_{i=1}^{n} f_{\theta}(x_i) \right\rbrace \quad \Rightarrow \quad \ell (\theta) = \sum\limits_{i=1}^{n} \log f_{\theta}(x_i). \end{align}\]
O estimador de máxima Verossimilhança (EMV) de \(\theta\) é o valor \(\hat{\theta} \in \Theta\) que maximiza a função de verossimilhança \(L(\theta)\), sendo \(\Theta\) o espaço paramétrico (conjunto dos possíveis valores de \(\theta\)), ou seja,
\[\begin{align} \hat{\theta} = \underset{\theta \in \Theta}{\text{arg max }} L(\theta). \end{align}\]
Dado que a função \(\log(\cdot)\) é estritamente contínua, temos que
\[\begin{align} \hat{\theta} = \underset{\theta \in \Theta}{\text{arg max }} L(\theta) = \underset{\theta \in \Theta}{\text{arg max }} \ell (\theta). \end{align}\]
Então, se \(\Theta\) o espaço paramétrico e \(\ell (\theta)\) é diferenciável, o EMV pode ser obtido como raíz da equação
\[\begin{align} \ell ' (\theta) = \dfrac{\partial \ell \theta}{\partial \theta} \Bigg|_{\theta = \hat{\theta}} = 0 \end{align}\]
Para concluir que a solução anterior é ponto de máximo, é preciso verificar que
\[\begin{align} \ell '' (\theta) = \dfrac{\partial^2 \ell \theta}{\partial \theta^2} \Bigg|_{\theta = \hat{\theta}} < 0 \end{align}\]
Sejam \(X_1, \ldots, X_n\) v.a. independentes e identicamente distribuídas (i.i.d.) com distribuição de Bernoulli, ou seja, \(X_i \sim Bernoulli (p)\), em que \(0 < p < 1\) desconhecido.
Resp.:
Sejam \(X_1, \ldots, X_n\) v.a. independentes e identicamente distribuídas (i.i.d.) com distribuição de Bernoulli, ou seja, \(X_i \sim Bernoulli (p)\), em que \(0 < p < 1\) desconhecido.
Resp.:
A função de verossimilhança para a Bernoulli é dada por \[L(p) = \prod\limits_{i=1}^{n} p^{x_i} (1-p)^{1-x_i} = p^{\sum\limits_{i=1}^{n}x_i} (1-p)^{n - \sum\limits_{i=1}^{n}x_i}\]
A função de log-verossimilhança é dada por \[\ell(p) = \sum\limits_{i=1}^{n}x_i \log p + (n - \sum\limits_{i=1}^{n}x_i) \log (1-p)\]
Sejam \(X_1, \ldots, X_n\) v.a. independentes e identicamente distribuídas (i.i.d.) com distribuição de Bernoulli, ou seja, \(X_i \sim Bernoulli (p)\), em que \(0 < p < 1\) desconhecido.
Resp.:
A derivada de log-verossimilhança em relação a \(p\) é dada por \[\dfrac{d}{dp} \ell(p) = \dfrac{1}{p} \sum\limits_{i=1}^{n}x_i - \dfrac{1}{1-p} \left(n - \sum\limits_{i=1}^{n}x_i \right)\]
Assim, temos que \[\dfrac{d}{dp} \ell(p) \Bigg|_{p = \hat{p}} = \dfrac{1}{\hat{p}} \sum\limits_{i=1}^{n}x_i - \dfrac{1}{1-\hat{p}} \left(n - \sum\limits_{i=1}^{n}x_i \right) = 0\]
Sejam \(X_1, \ldots, X_n\) v.a. independentes e identicamente distribuídas (i.i.d.) com distribuição de Bernoulli, ou seja, \(X_i \sim Bernoulli (p)\), em que \(0 < p < 1\) desconhecido.
Resp.:
logo, \[\dfrac{1}{\hat{p}} \sum\limits_{i=1}^{n}x_i = \dfrac{1}{1-\hat{p}} \left(n - \sum\limits_{i=1}^{n}x_i \right) \Rightarrow \hat{p} = \dfrac{1}{n} \sum\limits_{i=1}^{n}X_i = \overline{X}. \]
O estimador de Máxima Verossimilhança (EMV) de \(p\) é dado por \(\hat{p} = \dfrac{1}{n} \sum\limits_{i=1}^{n}X_i = \overline{X}\).
Sejam \(X_1, \ldots, X_n\) v.a. independentes e identicamente distribuídas (i.i.d.) com distribuição \(X_i \sim \mathcal{N}(\mu, 1)\).
Resp.:
Sejam \(X_1, \ldots, X_n\) v.a. independentes e identicamente distribuídas (i.i.d.) com distribuição \(X_i \sim \mathcal{N}(\mu, 1)\).
Resp.:
Neste caso, a função de verossimilhança é dado por
\[L(\mu) = \prod\limits_{i=1}^{n} \dfrac{1}{\sqrt{2 \pi}} \exp \left\lbrace -\frac{1}{2} (x_i - \mu)^2 \right\rbrace = (2 \pi)^{-\frac{n}{2}} \exp \left\lbrace -\frac{1}{2} \sum\limits_{i=1}^{n} (x_i - \mu)^2 \right\rbrace,\] em que \(\mu \in \mathbb{R}\). A log-verossimilhança é dado por
\[\ell (\mu) = -\frac{n}{2} \log (2 \pi) - \frac{1}{2} \sum\limits_{i=1}^{n} (x_i - \mu)^2\]
Resp.:
e temos que
\[\dfrac{d}{d \mu} \ell (\mu) = \sum\limits_{i=1}^{n} (x_i - \mu)\]
logo,
\[\dfrac{d}{d \mu} \ell (\mu) \Bigg|_{\mu = \hat{\mu}} = \sum\limits_{i=1}^{n} (x_i - \hat{\mu}) = 0 \quad \quad \Rightarrow \quad \quad \hat{\mu} = \dfrac{1}{n} \sum\limits_{i=1}^{n}X_i = \overline{X}.\]
Neste caso, temos que
\[\dfrac{d^2}{d \mu^2} \ell (\mu) \Bigg|_{\mu = \hat{\mu}} = -n < 0\]
Seja \(g(\cdot)\) uma função real invertível definida em \(\Theta\). Se \(\hat{\theta}\) é o EMV de \(\theta\), então \(g(\hat{\theta})\) é o EMV de \(g(\theta)\).
prova: temos que \(\theta = g^{-1}(g(\theta))\) e, portanto \(L(\theta) = L \left( g^{-1}(g(\theta)) \right)\).
De modo que \(\hat{\theta}\) maximiza os dois lados da equação anterior, isto é \(\hat{\theta} = g^{-1}(\widehat{g(\theta)})\), logo, \(\widehat{g(\theta)} = g(\hat{\theta})\), ou seja, o EMV de \(g(\theta)\) é \(g(\hat{\theta})\).
Consideremos novamente \(X_1, \ldots, X_n\) v.a. i.i.d. com distribuição \(Bernoulli(p)\), e suponha que queremos estimar a variância \(g(p) = p(1-p)\).
Vimos que \(\hat{p} = \overline{X}\) é o EMV de \(p\). Logo, pelo princípio da invariância temos que o estimador de \(g(p)\) é
\[g(\hat{p}) = \hat{p}(1-\hat{p}) = \overline{X}(1 - \overline{X}).\]
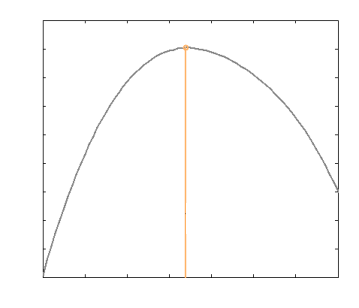
Observação: Nos casos em que o suporte da distribuição de \(X\) depende do parâmetro \(\theta\) ou o máximo ocorre na fronteira de \(\Theta\), o EMV não pode ser obtido pelos métodos anteriores. Neste caso, o EMV pode ser obtido inspencionando o gráfico da função de verossimilhança.
Muitos resultados sobre EMV’s são obtidos supondo certas condições de regularidade, as quais são listadas a seguir.
Sejam \(n\) observações e \(X_1, \ldots, X_n\) v.a. cuja distribuição comum pertence a uma família de distribuições \(\mathcal{F} = \{F_{\theta}:\theta \in \Theta \}\). Além disso, suponha que:
A0) \(\theta_1 \neq \theta_2 \Rightarrow F_{\theta_1} \neq F_{\theta_2}\)
A1) Todas as distribuições têm o mesmo suporte, o qual não depende do parâmetro \(\theta\) desconhecido.
A2) As observações têm densidade \(f_{\theta} (x) = f(x, \theta)\) com respeito a algum parâmetro \(\theta\), para \(\theta \in \Theta\).
A3) O espaço paramétrico \(\Theta\) contém uma vizinhança do valor verdadeiro de \(\theta\).
Vamos considerar agora situações em que \({\boldsymbol \theta} = (\theta_1, \ldots, \theta_p)\) é um vetor paramétrico. Neste caso, \(\Theta \in \mathbb{R}^p\). Nos casos em que as condições de regularidade (A0) - (A3) são satisfeitas em EMV’s de \(\theta_1, \ldots, \theta_p\) são obtidos como soluções das equações
\[\begin{align} \dfrac{\partial \ell ({\boldsymbol \theta})}{\partial \theta_i} = 0, i = 1, \ldots, p \end{align}\]
Suponha que a função de verossimilhança depende de dois parâmetros \(\theta_1\) e \(\theta_2\) (ou seja, \({\boldsymbol \theta} = (\theta_1, \theta_2)\)). Então, utilizando a equação
\[\begin{align} \dfrac{\partial \ell (\theta_1, \theta_2)}{\partial \theta_1} = 0 \end{align}\]
em que substituindo a solução na verossimilhança conjunta, temos agora uma função apenas de \(\theta_2\), ou seja,
\[\begin{align} g(\theta_2) = \ell (\hat{\theta}_1(\theta_2), \theta_2) \end{align}\]
Sejam \(X_1, \ldots, X_n\) v.a. i.i.d. com distribuição \(N(\mu, \sigma^2)\) em \(\mu\) e \(\sigma^2\) são desconhecidos.
Temos que \({\boldsymbol \theta} = (\mu, \sigma^2)\) e
\[L({\boldsymbol \theta}) = \left(\dfrac{1}{2 \pi \sigma^2}\right)^{\frac{n}{2}} \exp \left\lbrace -\frac{1}{2 \sigma^2} \sum\limits_{i=1}^{n}(x_i - \mu)^2 \right\rbrace\]Resp.:
## Exemplo 1:
set.seed(1)
# Gerando uma amostra Normal(mu,sigma^2)
mu <- 5
sigma2 <- 2.5
x <- rnorm(n = 100, mean = mu, sd = sqrt(sigma2))
# Estimando Mu e Sigma2
mu_hat <- mean(x)
sigma2_hat <- sum((x - mu_hat)^2) / length(x)
# Visualizando parâmetro estimado
mu_hat
sigma2_hat
var(x)[1] 5.172166
[1] 1.996736
[1] 2.016905Sejam \(X_1, \ldots, X_n\) e \(Y_1, \ldots, Y_n\) amostras independentes, em que as distribuições conjuntas estão indexadas pelo mesmo parâmetro \(\theta\). Então, a função de verossimilhanda é dada por
\[\begin{align} L(\theta; {\boldsymbol x}, {\boldsymbol y}) = L(\theta; {\boldsymbol x})L(\theta; {\boldsymbol y}) \end{align}\]
em que \({\boldsymbol x} = (x_1, \ldots, x_n)^\top\) e \({\boldsymbol y} = (y_1, \ldots, y_n)^\top\) são amostras observadas. Assim, a log-verossimilhança é dada por
\[\begin{align} \ell (\theta; {\boldsymbol x}, {\boldsymbol y}) = \ell (\theta; {\boldsymbol x}) + \ell (\theta; {\boldsymbol y}) \end{align}\]
A extensão para mais de duas amostras é trivial.
Seja \(\delta_n\) estimador de \(g(\theta)\) baseado em \(n\) observações. Dizemos que \(\delta_n\) é estimador consistente de \(g(\theta)\) quando \(\forall \epsilon > 0\)
\[\begin{align} \lim\limits_{n \rightarrow \infty} P(|\delta_n - g(\theta)| > \epsilon) = 0 \end{align}\]
Notação: \(\delta_n \overset{p}{\rightarrow} g(\theta)\) em que \(\overset{p}{\rightarrow}\) denota convergência em probabilidade.
Temos que quando as condições de regularidade forem satisfeitas, o EMV é consistente.
Sejam \(X_1, \ldots, X_n\) i.i.d. com distribuição \(N(\mu,\sigma^2)\). Vimos que EMV de \(\mu\) é \(\hat{\mu} = \overline{X}\). Pela Lei dos Grandes Números,
\[\overline{X} = \frac{X_1 + \ldots + X_n}{n} \overset{p}{\rightarrow} E(\overline{X}) = \mu\] Logo, \(\hat{\mu} = \overline{X}\) é estimador consistente para \(\mu\).
## Exemplo 1:
set.seed(55)
# Tamanhos de Amostra
n <- c(10, 30, 50, 100, 1000, 10000)
# Normal(mu,1)
mu <- 5
for (i in n){
x <- rnorm(n = i, mean = mu, sd = 1)
# Estimando Mu
mu_hat <- mean(x)
# Viés
vies <- mu_hat - mu
# Visualizando parâmetro estimado
print(paste0("Tamanho da Amostra: ", i, ", Mu Estimado:",round(mu_hat,2)," e Viés: ", round(vies,2)))
}[1] "Tamanho da Amostra: 10, Mu Estimado:4.84 e Viés: -0.16"
[1] "Tamanho da Amostra: 30, Mu Estimado:5.14 e Viés: 0.14"
[1] "Tamanho da Amostra: 50, Mu Estimado:4.94 e Viés: -0.06"
[1] "Tamanho da Amostra: 100, Mu Estimado:4.97 e Viés: -0.03"
[1] "Tamanho da Amostra: 1000, Mu Estimado:5.03 e Viés: 0.03"
[1] "Tamanho da Amostra: 10000, Mu Estimado:4.99 e Viés: -0.01"Sejam \(X_1, \ldots, X_n\) uma a.a. de \(X\) com função densidade (ou probabilidade) \(f(x; \theta)\). Suponha que as condições de regularidade (A0)-(A3) estão satisfeitas e seja \(\theta_0\) o valor verdadeiro de \(\theta\). Então
\[\begin{align} P_{\theta_0}\left(L(\theta_0)>L(\theta_1)\right) \underset{n \rightarrow \infty}{\rightarrow} 1, \forall \theta_1 \neq \theta_0 \end{align}\]
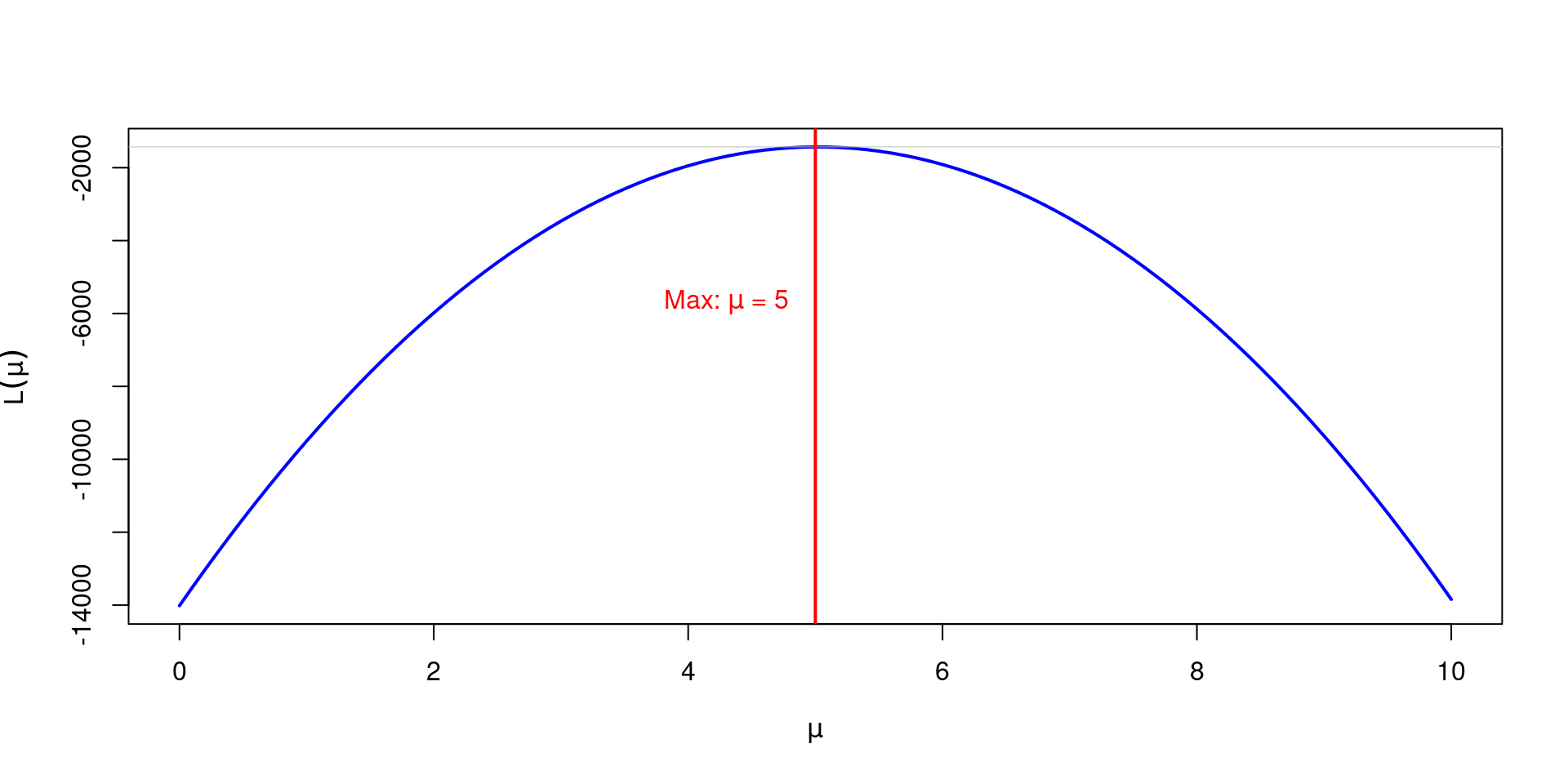
## Exemplo 1:
set.seed(5)
# Função de Log-Verossimilhança para uma amostra da Normal
log_likelihood_function <- function(x, mu){
return(sum(log(dnorm(x, mean = mu, sd = 1))))
}
# Tamanho de Amostra
n <- 1000
# Parâmetro Verdadeiro
mu_0 <- 5
x <- rnorm(n = n, mean = mu_0, sd = 1)
# Verificando o valor da Função de Log-Verossimilhança
mu_1 <- 2; mu_2 <- 5.1; mu_3 <- 4.9
# --
result1 <- log_likelihood_function(x, mu_0); result2 <- log_likelihood_function(x, mu_1)
result3 <- log_likelihood_function(x, mu_2); result4 <- log_likelihood_function(x, mu_3)
#--
print(paste0("Para mu = ", mu_0, ", o valor de l(mu) = :",round(result1,2)))
print(paste0("Para mu = ", mu_1, ", o valor de l(mu) = :",round(result2,2)))
print(paste0("Para mu = ", mu_2, ", o valor de l(mu) = :",round(result3,2)))
print(paste0("Para mu = ", mu_3, ", o valor de l(mu) = :",round(result4,2)))[1] "Para mu = 5, o valor de l(mu) = :-1430.67"
[1] "Para mu = 2, o valor de l(mu) = :-5982.86"
[1] "Para mu = 5.1, o valor de l(mu) = :-1433.93"
[1] "Para mu = 4.9, o valor de l(mu) = :-1437.41"Bolfarine, H. e Sandoval, M.C. (2001). Introdução à Inferência Estatística, Coleção Matemática Aplicada, Sociedade Brasileira de Matemática.
Casella, G. e Berger, R. (1990) “Statistical Inference”, Wadsworth & Brooks, California
Mood, A. , Graybill, F. e Boes, D. (1974) “Introduction to the Theory of Statistics”, McGraw-Hill, New York.
Complementar
Bickel, P.J. e Doksum, K. A. (2001). Mathematical Statistics: Basic Ideas and Selected Topics. San Francisco: Holden Day.
Dudewicz, E.J. e Mishra, S.N. (1988) - Modern Mathematical Statistics - John Wiley & Sons.
Lehmann, E. and Casella, G. (1998) “Theory of Point Estimation”, 2nd edition, Springer, New York.
OBRIGADO!
Slide produzido com quarto
Aprendizagem Estatístico de Máquina - Prof. Jodavid Ferreira